phdv61
Expert gestion électronique
-
Inscription
-
Dernière visite
Tout ce qui a été posté par phdv61
-
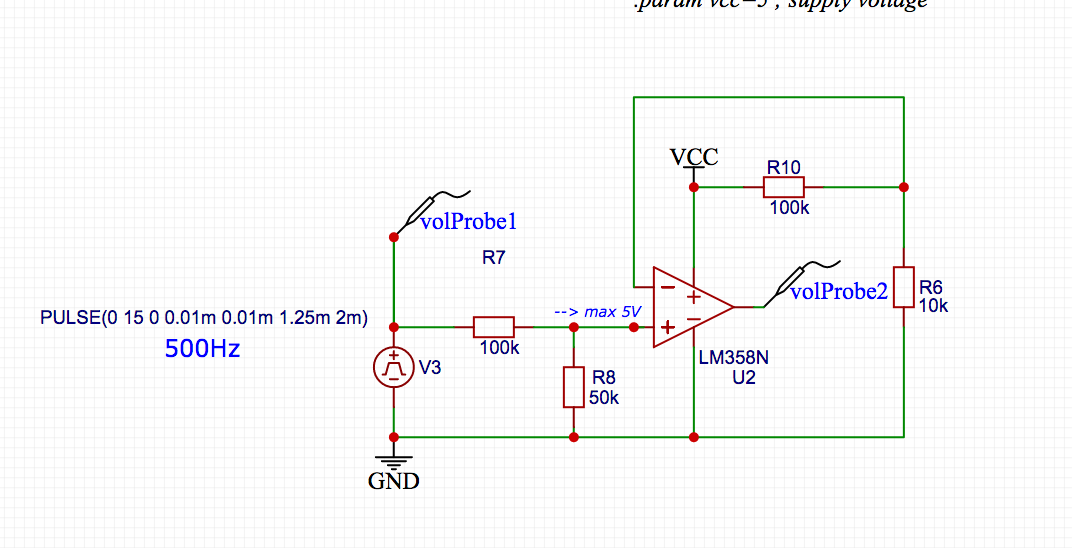
 regarde les specs de l'ampli op que tu utilises. il n'est pas rail to rail. et donc Vmin et VMax sont supérieur et inférieur aux Tensions d'alim, ici 0 et 5V. 0 +2 V donne 2V 5V - 2V donne ? 3V Si tu savais les we et les nuits que j'ai passées à apprendre et comprendre ... ! et à m'arracher les cheveux. Comme dis plus haut, je pense qu'on peut faire l'impasse de cet aop, y compris pour la restitution du MAF.
regarde les specs de l'ampli op que tu utilises. il n'est pas rail to rail. et donc Vmin et VMax sont supérieur et inférieur aux Tensions d'alim, ici 0 et 5V. 0 +2 V donne 2V 5V - 2V donne ? 3V Si tu savais les we et les nuits que j'ai passées à apprendre et comprendre ... ! et à m'arracher les cheveux. Comme dis plus haut, je pense qu'on peut faire l'impasse de cet aop, y compris pour la restitution du MAF. -
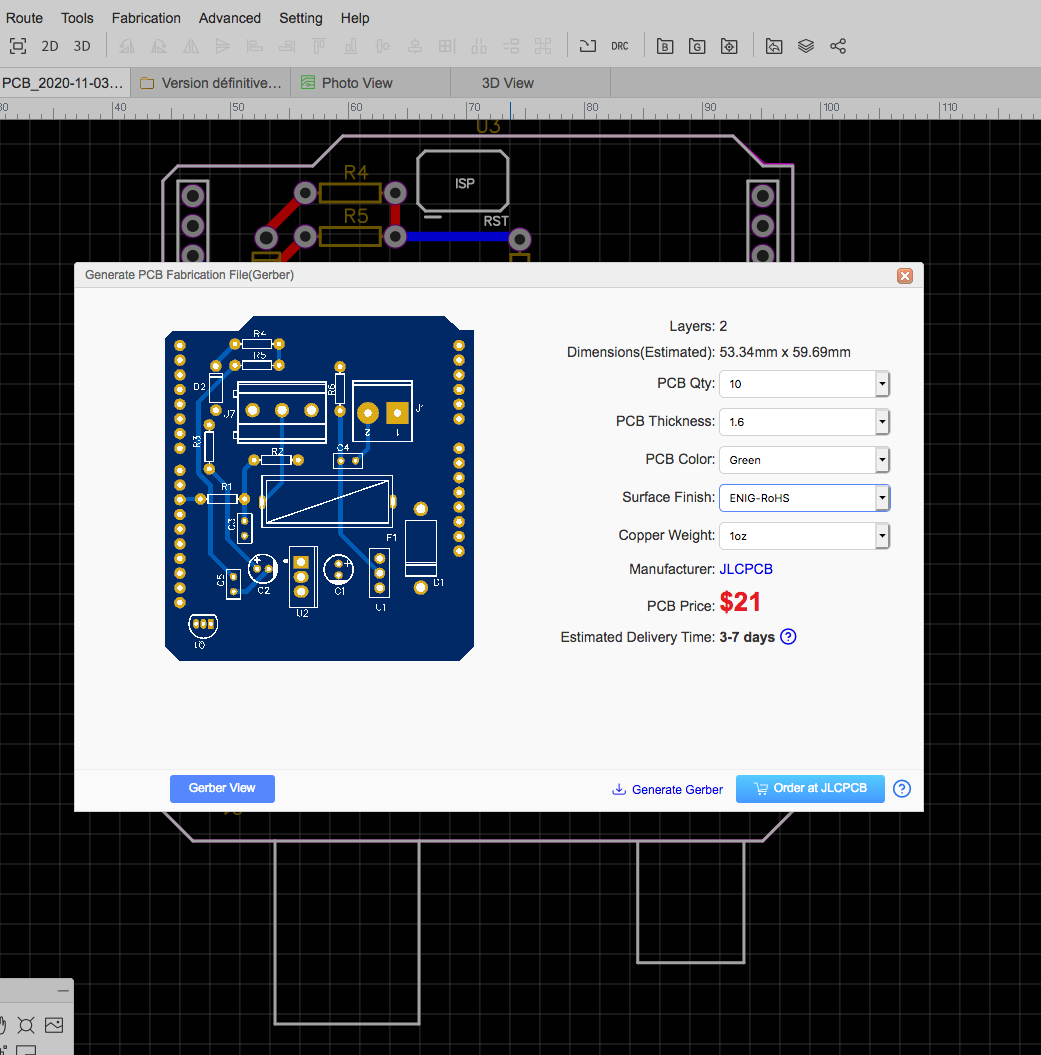
Dernière chose, si on fait les choses proprement, qu'on choisit bien les composants de la BOM ( Bill Of Materials ) ou "liste des composants", on peut ensuite commander la carte toute câblée et terminée en quantités multiples de 5. Et comme le soudage est automatisé, c'est rapide et ne coûte que quelques Euros de plus. Pourquoi s'emmerder ? prix pour la petite carte ci-dessus sans le port, ni composants, ni le câblage et test pour 10 circuits imprimés ROHS sans plomb. Soit 2E le CI. pas mal... Il faut par contre être sûr de son coup, car si on a oublié un fil, une connexion, ou qu'on s'est trompé, il faudra couper des pistes sur la carte et:ou ajouter des composants. Pour ce faire on laisse toujours un peu de place et quelques trous supplémentaires, au cas où... Mais les interventions après coup sont toujours longues et couteuses en temps. et ce n'est ni propre, ni 'industriel'. Bon, c'est l'heure du thé.

-
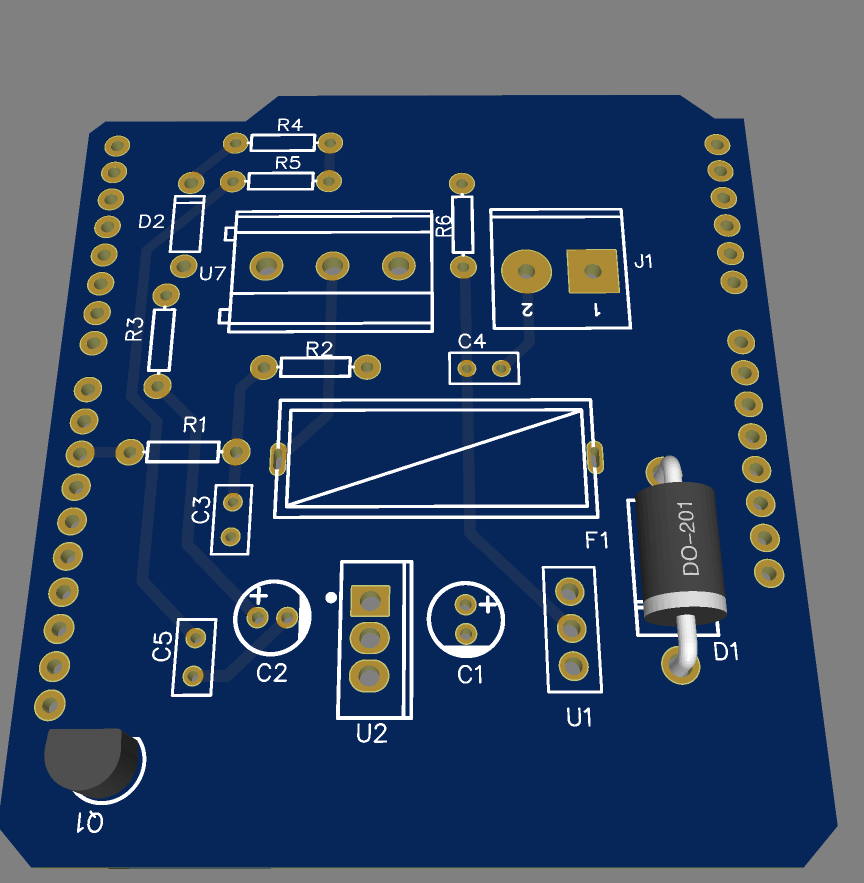
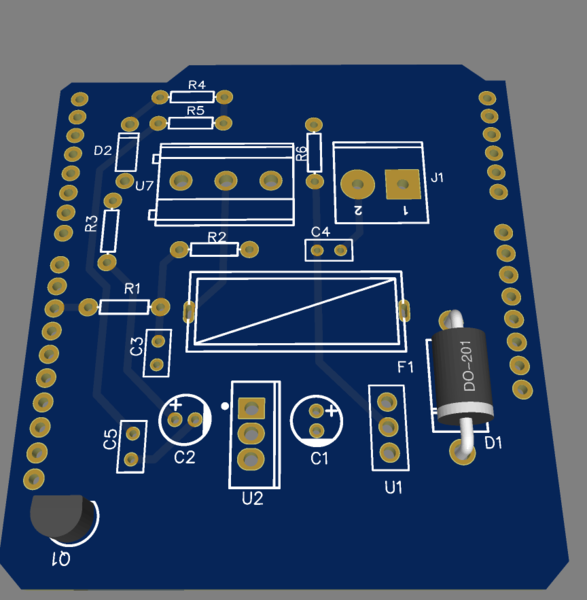
et même 3D si on a pris le soin de prendre des composants dont le modèle 3D existe, ou de télécharger sur les sites des fabricants les modèles 3D de leurs composants. ça permet de voir que ça rentre correctement et que ça ne touche pas. Pas de bol, je n'ai pas fait ce qu'il fallait, et donc la vue est très incomplète. Mais bon, je m'en fiche pour ce qu'on fait pour le moment ici ensemble. Ainsi s'achève la partie ' je conçois une petite électronique pour supprimer les 'limp modes de mon patrol' ou 'mises en sécurité ECU liées à la tension du débitmètre'. Mais ça vous donne idée du process à suivre. Il n'y a aucune 'magie'. juste du boulot. Et c'est aussi logique que la mécanique, @jacktrol. Cela fait beaucoup en quelques jours, mais tu as 15 J pour "potasser".
-
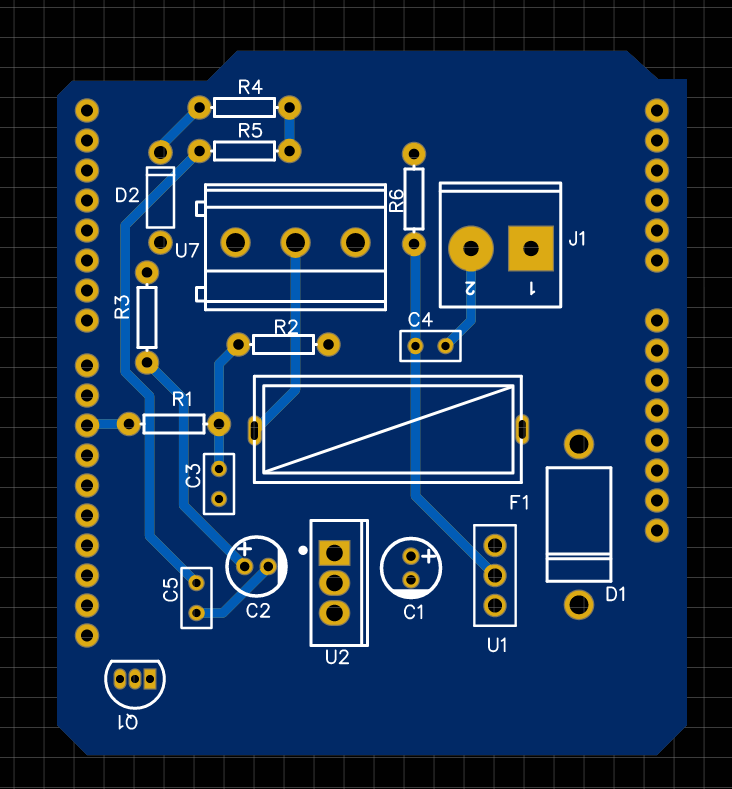
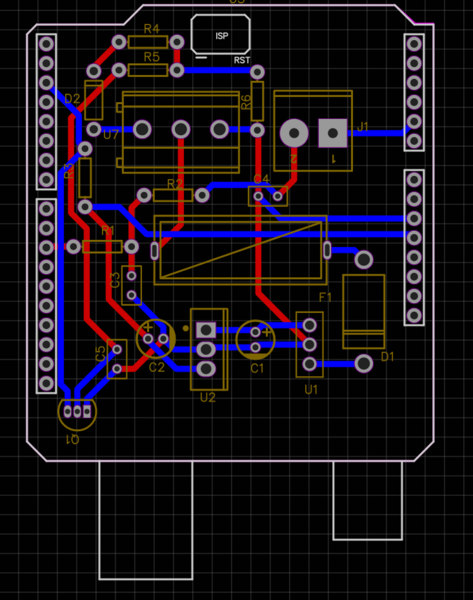
Enfin, on peut avoir une vue 2D de notre circuit,

-
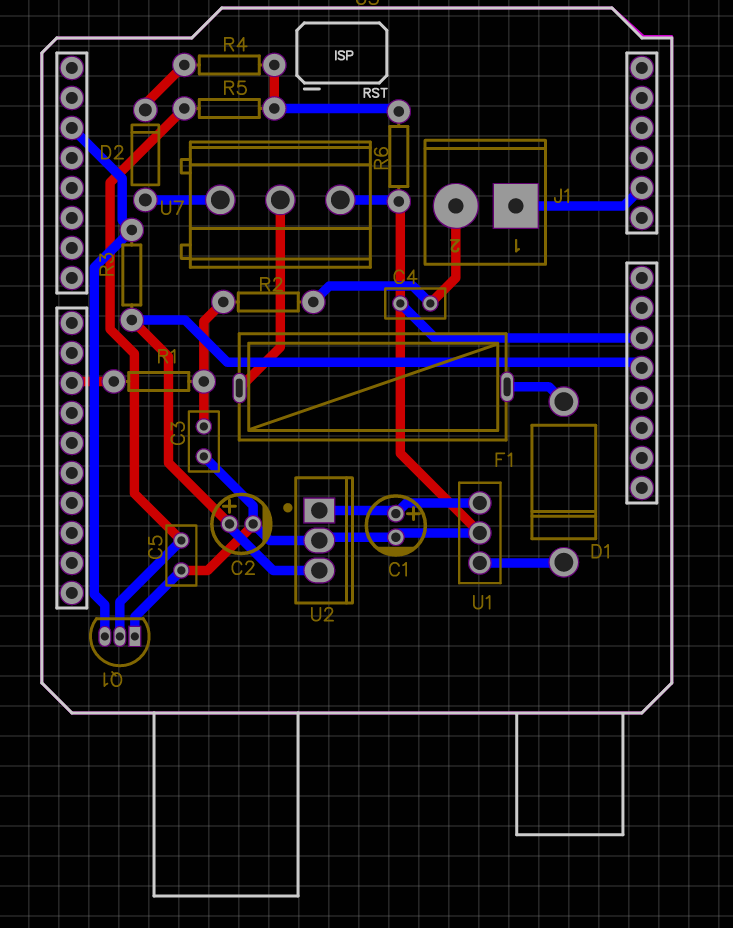
Ensuite, je passe à l'étape de placement des composants. elle est manuelle. Cela veut dire que le système nous met l'empreinte de la carte et tous les composants reliés par les fils qui vont bien, et il faut les disposer le mieux possible, pour éviter d'avoir des fils dans tous les sens, et surtout trop de fils qui se chevauchent. Sinon, cela devient in-démerdable. Au bout d'une dizaines de minutes ( il y a peu de composants ), j'arrive à ça, après avoir lancé un 'routage' automatique. C'est l'ordi qui relie proprement avec du fil bleu (verso) et du fil rouge (recto), les deux couches que va comporter ultimement mon circuit imprimé. Pour le proto à la maison, il faudra câbler/souder A LA MAIN. Il y a déjà pas mal de fils ... En passant + de temps, on doit pouvoir améliorer.
-
Donc j'ai commencé, pour simplifier la compréhension, par créer un nouveau projet, et j'y ai copié tous mes,sous-ensembles en renommant automatiquement les composants, pour qu'ils aient des numéros distincts, afin qu'on puisse les identifier correctement par la suite : Vous reconnaitrez (ou pas) l'empreinte de l'Arduino UNO R3. j'ai ajouté les deux connecteurs à vis qui permettront de relier le 12V, la masse, le signal MAF et le signal RPM, et de ressortir le signal MAF traité. J'ai aussi enlevé tout ce qui avait permis de faire nos petites simulations. J'ai mis n'imorte quel transistor (pour le moment), car celui que j'avais utilisé n'avait pas d'empreinte physique dans la bibliothèque. Ce n'est pas grave, car c'est moi qui vais cabler/souder, du moment que l'empreinte est bonne.

-
Bon je ne sais plus où j'en suis, mais je continue les explications. On va dire 'leçon 4'. Maintenant qu'on a simulé nos différents sous-ensembles, et qu'on a (pense avoir?) trouvé de bonnes solutions, on va essayer de voir comment on va câbler tout cela et faire rentrer les composants sur notre 'shield' prototype. C'est quoi un 'shield' Arduino, c'est tout simplement un petit circuit imprimé avec des connecteurs, qui établit les contacts avec les connecteurs de l'Arduino, et qui nous permet de relier nos composants à cette carte. Je me suis aidé de l'atelier chinois EasyEDA, qui comprend des 'empreintes' de ces fameux shield, qu'on peut insérer sur la feuille avec nos composants, et établir les connexions nécessaires entre eux. Easy EDA nous dessine aussi les contours de ce shield. pratique.
-
Salut @Grampa'trol, ce post avait ... deux ans. Quand tu dis 'la tige de l'actuateur ne remonte complètement', veux-tu dire que la tige n'entraine pas le levier jusqu'à la vis de butée ? 1> Tu désolidarises la tige du levier ( attention de ne pas perdre le circlips ), et tu vérifies que le levier va bien d'un coté à l'autre sans aucun point dur ( clic... clac ) 2/ Tu branches une petite pompe à vide manuelle sur un petit bout de tuyau que tu enfiles directement sur l'actuateur. Et tu fais le vide. à - 550mbar, la tige atteint le maximum qu'elle peut atteindre. Si ton turbo n'est plus le Garett original, et qu'il n'a pas exactement les mêmes cotes mécaniques, alors peut-être faut-il adapter la longueur de tige. Au ralenti, la tige de l'actuateur doit remonter et appliquer le levier sur la vis de butée. Cette vis de butée est normalement réglée en usine. A priori, il ne faut pas la toucher (même si je l'ai fait, mais pour d'autres raisons). A l'arrêt, la tige est toute sortie (car il n'y a plus de vide pour contrer le ressort de l'actuateur) et doit pousser le levier des aubes à fond.
-
Pour résumer la partie 'acquisition du signal RPM (tr/mn)' à partir du signal PMH (point mort haut), à récupérer à l'entrée ECU, on dispose de deux solutions Une à base de transistor : Une à base d'ampli-op : L'ampli OP est élégant, mais il y aura un peu plus de soudures à faire, et il faut approvisionner l'ampli-OP. c'est vrai que je l'ai utilisé pour la restitution du signal MAF, mais on doit pouvoir probablement s'en passer aussi. Cela simplifie le montage d'un proto de test sur plaque à trou du coup. Par la suite, comme je vais recevoir 10 Circuits imprimés de chine sur la base de mon schéma initial (mais il fait bien d'autres choses), vous pourrez l'utiliser tel quel puisqu'il fonctionne, ou couper une piste, et tirer quelques fils pour supprimer soit le transistor, soit l'ampli-OP. Ce CI comprend des borniers à vis, et se fixe par 6 vis dans un boitier plastique du commerce. Ou sinon, on refera un petit CI spécifique, avec des composants CMS qu'on fera fabriquer et câbler en chine. On verra. Un truc à la fois.

-
Oui, car tous les composants n'ont pas de modèle spice.
-
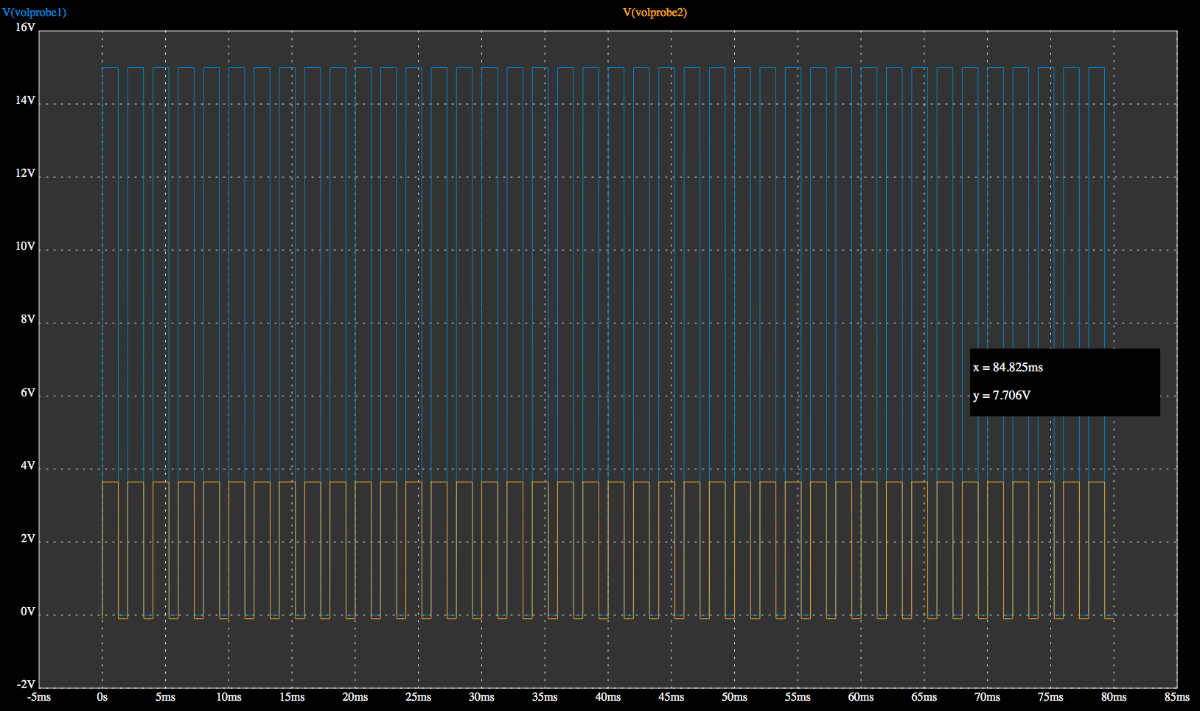
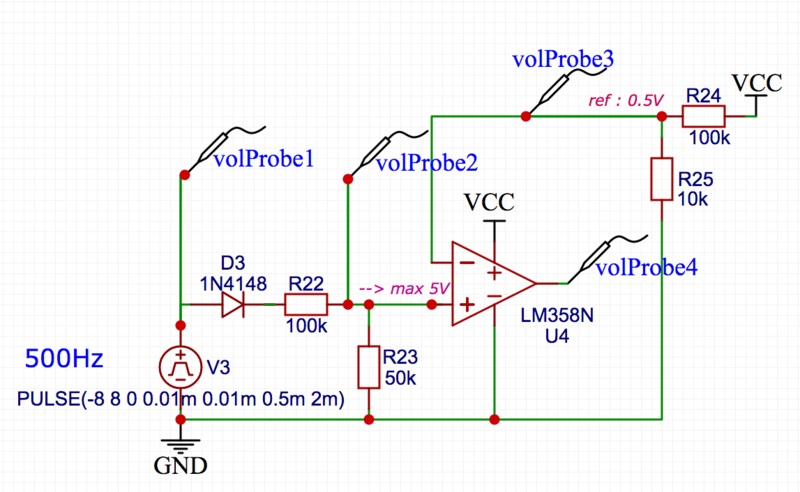
Monté en comparateur comme ça, ça marche : Référence à 0.5V. Pont 1/3 sur l'entrée RPM, donc la tension max sur l'entrée ne dépassera pas la tension d'alim de 5V. Et les 150k que voit le capteur ne vont pas le perturber. Et la simulation fonctionne :


-
c'est pas idiot. Amp op en comparateur avec une tension de référence de 2.5 V par exemple, tout ce qui est en dessous devient 0V, et tout ce qui est au dessus devient 5V. Radical. et un bête LM358 conviendrait, mais comme pour le MAF j'utilise un rail to rail, on peut aussi l'uiliser, au besoin après un pont diviseur le cas échéant, car la tension (et/ou le courant) sont limités sur les pinoches d'entrée des Amp Op. Il faudra donc probablement deux ponts de résistances.
-
heuuuuu tu pourrais, mais il faudrait alimenter ton ampli op avec une tension stabilisée > 14V pour pouvoir en sortir toujours la tension du capteur RPM. Et comment fais-tu pour trouver, puis alimenter un régulateur qui te sortirait du 14,5 V ? Il te faudrait au moins du 16V (du 24V ) tu vois où ça te mène ? ici, j'ai calculé tous les éléments pour que le montage marche quelle que soit la tension en sortie capteur, de 4V à 14,5V. No souci. Je n'ai pas trouvé mieux. EDIT : pardon, en fait tu parles plutôt d'utiliser l'ampli op en saturation ou comparateur, et non pas en suiveur. il faut en trouver un qui accepte de prendre du 14,5V dans les dents en étant alimenté en 5V. pas sûr qu'il aime... de mémoire on est limité en tension d'entrée par la tension d'alim sur ces bestioles, non ? A voir.
-
Bon, je vais m'offrir une petite bière maintenant. Je vous laisse digérer, et commenter si j'ai écrit des conneries ( je pense les avoir toutes faites en apprenant ces deux dernières années ).
-
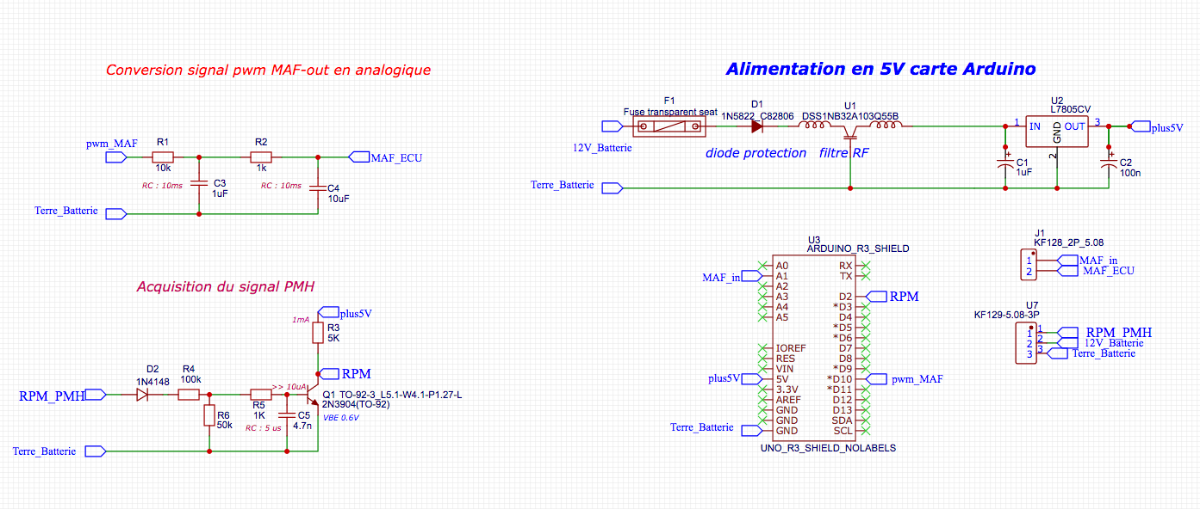
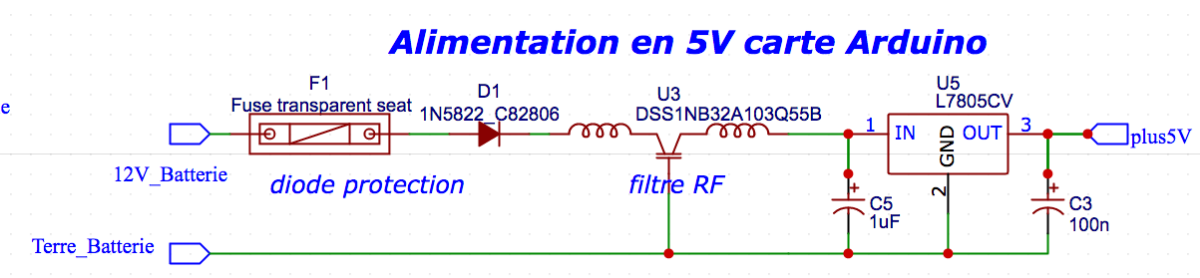
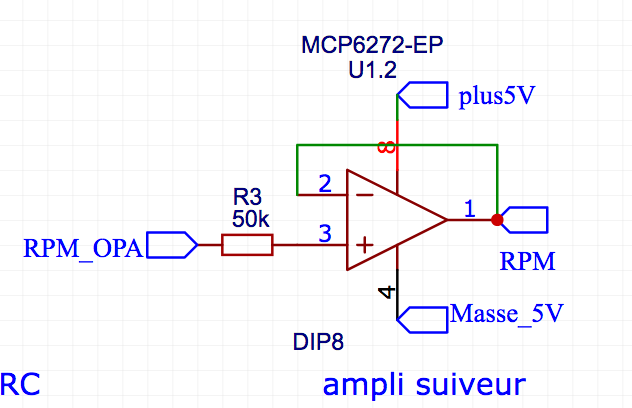
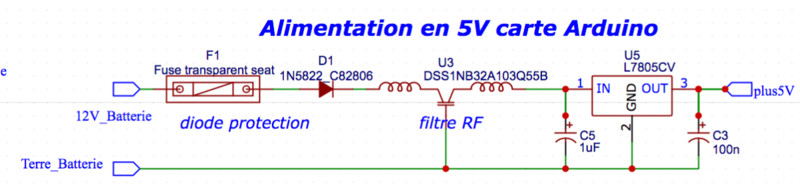
Leçon 3 : Pour en finir avec les aspects matériels : Comme dit plus haut, je suis repassé dans le second ampli op disponible avec le signal RPM avant de l'envoyer à l'Arduino ( avec une impédance de sortie faible pour l'ampli op, et grande pour l'Arduino). On peut sans doute s'en passer, mais en cas de souci ou de court-circuit en amont, c'est l'ampli op sur support qui dégagera et sera facile à changer. Alimentation 5V de notre carte Arduino : Et enfin, il faut ajouter, pour le jour où on aura mis notre logiciel dans l'Arduino, et que notre carte tourne de manière autonome, une alimentation 5V que l'on construit à partir du 12V "Ignition". J'ai pris en T sur le fll l'alim de mon autoradio, car on ne tire pas grand chose dessus ( quelques dizaines de mA ). On remarquera un petit composant ( U3 ) qui est un filtre RF que j'ajoute car on joue avec un signal pwm de 500Hz, qu'on n'a pas forcément envie d'entendre sur la radio grandes ondes ou petites ondes au milieu du désert marocain ou ailleurs. ( à priori pas de souci en FM... ). Et voilà YAPLUKA faire du soft maintenant.
-
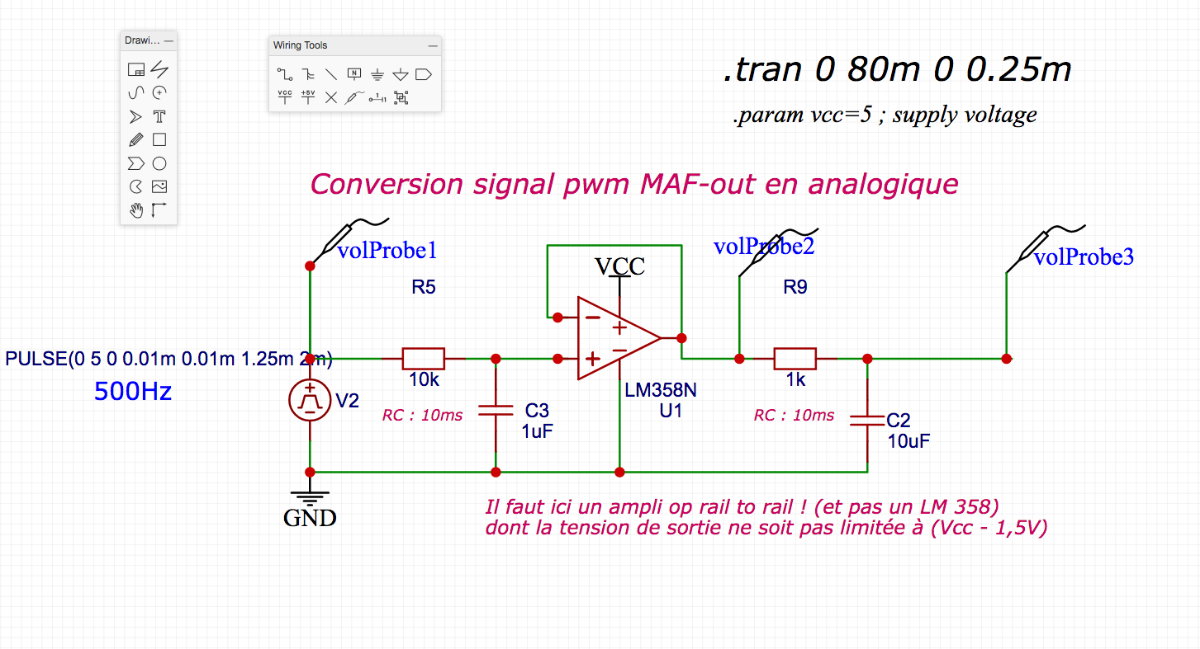
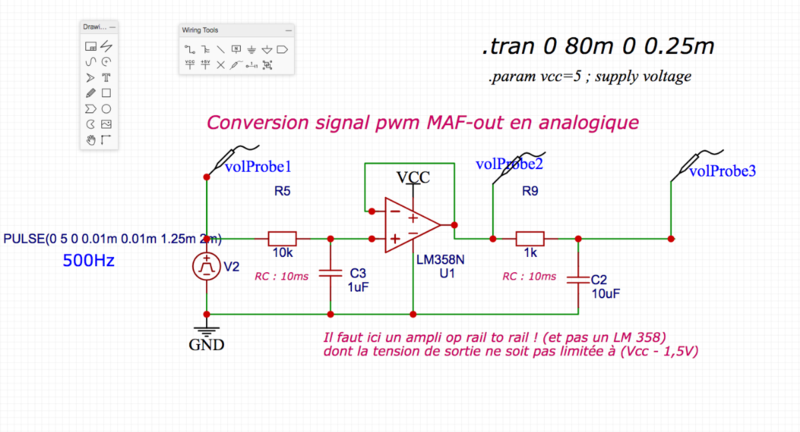
Oui, je vais te dire. D'abord, j'explique ci-dessous pourquoi je viens insérer un ampli-op entre les deux filtres passe-bas , pour mieux "conditionner" le signal MAF que nous allons corriger dans l'Arduino avant de le restituer comme ceci : Première raison : la résistance de 10K n'est pas bien grande pour "prélever" le signal MAF en sortie du capteur. Les entrées des microcontrôleurs ont une très grande impédance pour ne pas "effondrer" les petits courants en provenance des dits capteurs. L'ampli OP en mode suiveur a une très grande impédance d'entrée sur ses bornes ' la borne "+" ici au dessus. Cela règle donc le problème. Deuxième raison : L'impédance de sortie du dit ampli-op est très faible. Parfait pour attaquer l'entrée de l'ECU, qui n'aura donc aucun souci pour "l'avaler". Et donc je trouve le coup de l'ampli op, qui est utilisé ici en mode "suiveur", a un gain de 1 et conserve donc la tension, assez "élégant". Il sert juste à 'adapter' les "impédances". Par contre, il faut en choisir un en mode 'rail to rail', qui veut dire que les tension min et max peuvent aller jusque très près des tensions d'alimentation ( ici 0 et 5V ). Le LM 358 que j'ai utilisé ici car EasyEDA a le modèle "spice" permettant de faire des simulations de circuit, est limité en tension de sortie à Vcc ( tension d'alimentation) moins 1,5V. On ne pourrait donc pas avoir + de 3,5V en sortie, sauf à alimenter l'ampli Op en 9V par exemple. Et on n'a pas prévu cette alimentation ( mais on pourrait ). E le MAF va de 1V environ contact mis, jusque + de 4,5V. Conclusion, dans mon montage j'ai pris un MCP6272-EP en boitier DIP8 ( soudage traversant ), qui contient deux ampli op, car c'est ce que j'avais trouvé il y a presque 2 ans. Il existe une multitude d'autres ampli-op équivalents. Il faut qu'ils soient "dual op amp", "single supply", DIP 8, et "rail to rail". Le petit souci c'est qu'ils ne sont souvent plus en stock car de moins en moins utilisés., au profit de packaging de type Je suggère de les monter sur support. car c'est un composant à 8 pattes qu'il sera difficile de dessouder le jour venu si on le "crame". Un OPA340PA de chez Texas fait aussi l'affaire par exemple : https://www.mouser.fr/ProductDetail/Texas-Instruments/OPA340PA?qs=7nS3%2BbEUL6uGkqm3FBFIww%3D%3D&vip=1&gclid=EAIaIQobChMIquWx-7Dk7AIVw-FRCh1xHQnVEAQYASABEgIWpPD_BwE
-
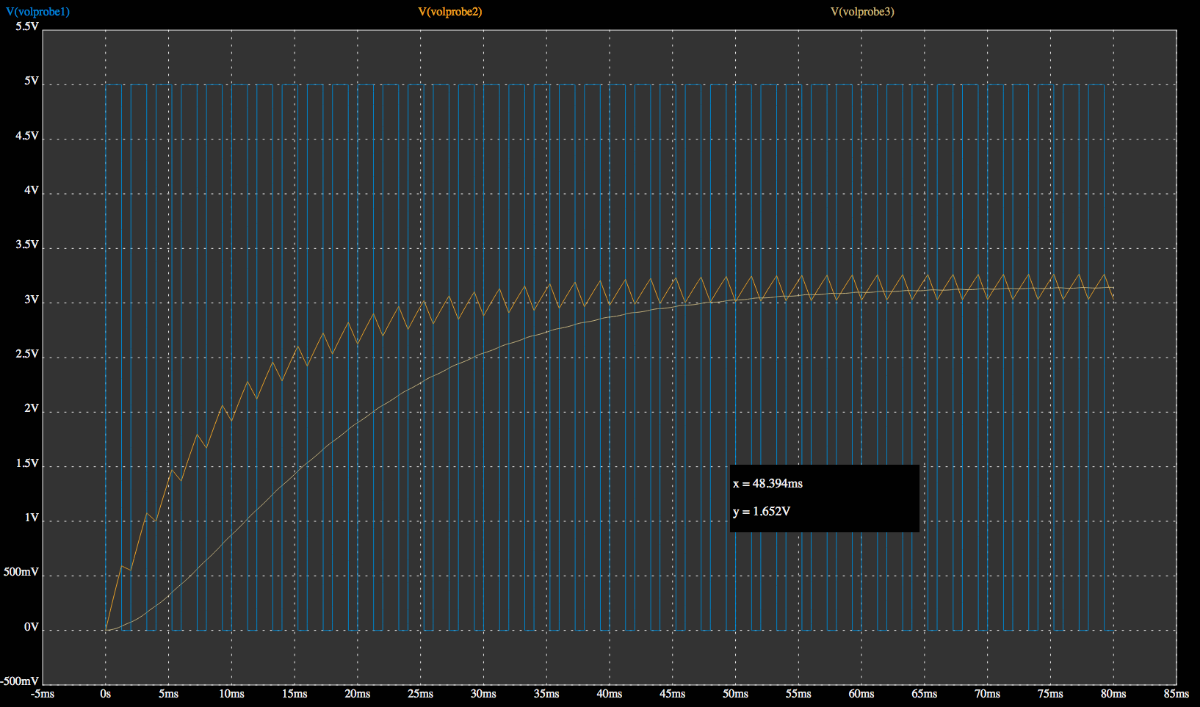
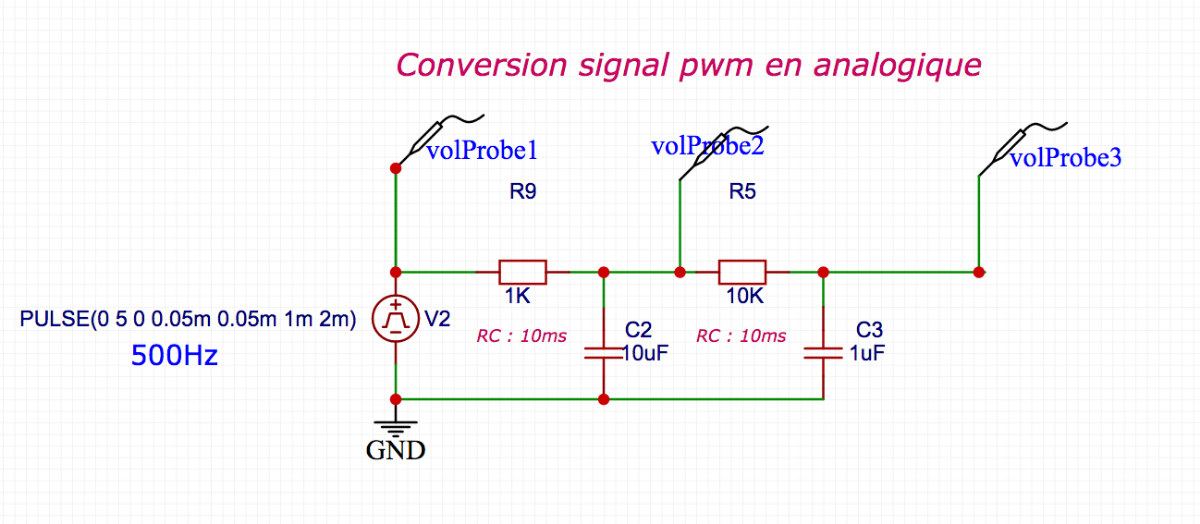
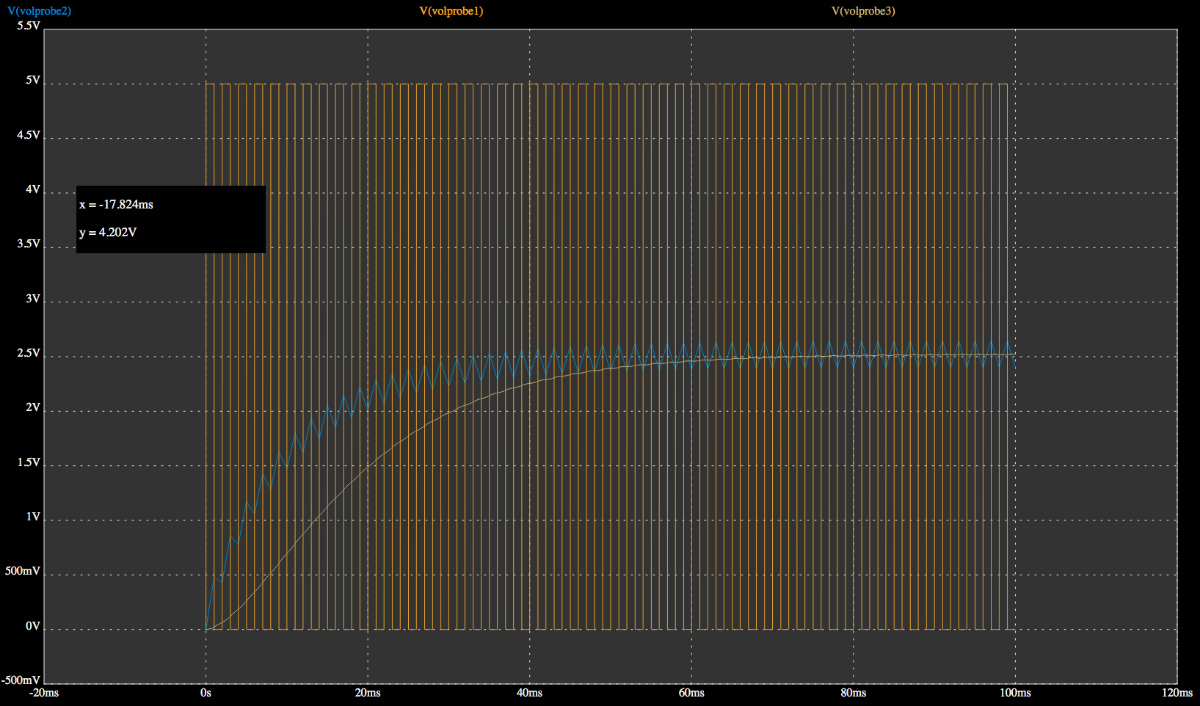
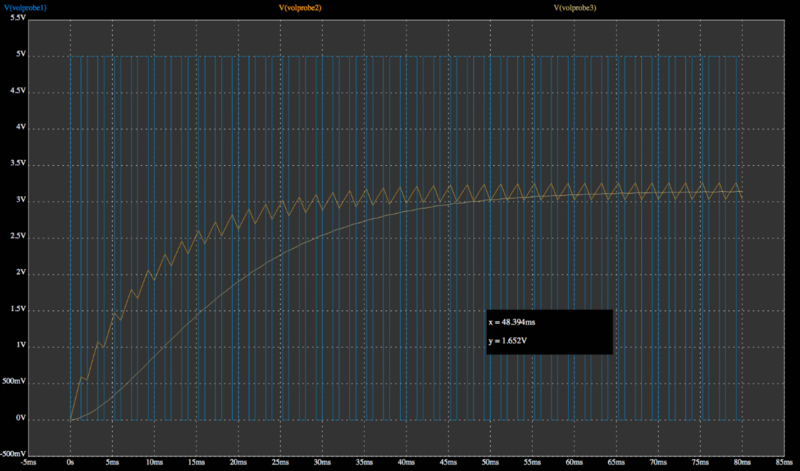
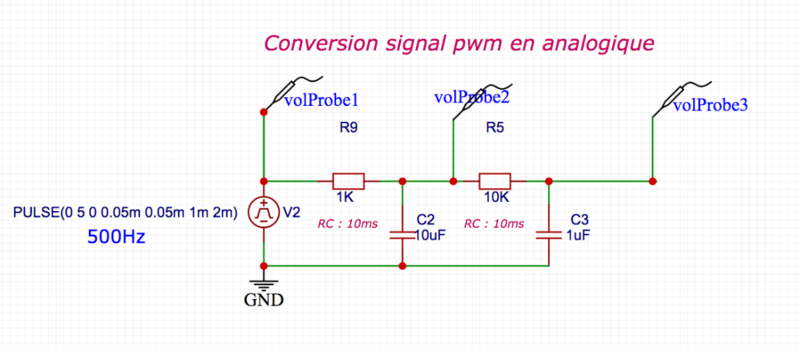
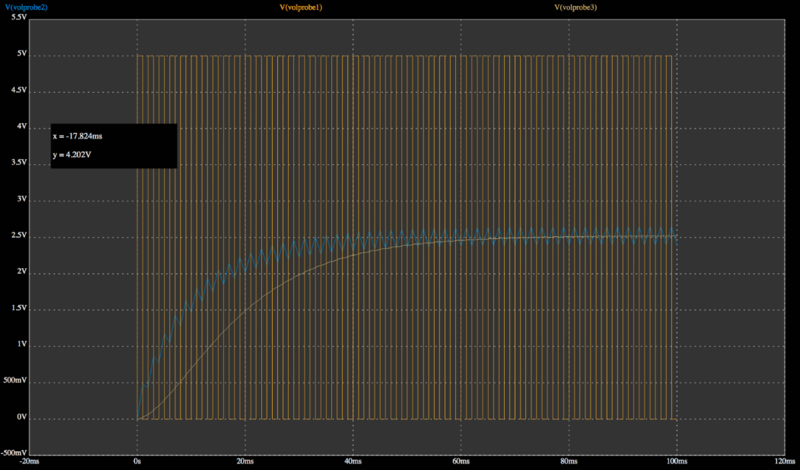
Leçon 2 : Comment convertir un signal pwm en sortie Arduino, en un signal analogique propre acceptable par l'ECU. L'arduino a des entrées analogiques haute impédance 0-5V qui permettent de prélever des signaux analogiques, de capteurs par exemple, sans perturber ces derniers, et de les digitaliser (les mettre sous format numérique qu'on peut ensuite "traiter, filtrer, modifier, corriger comme on le souhaite). Par contre, l'Arduino n'a pas de convertiseur numérique-analogique permettant de restituer ces signaux corrigés. L'arduino n'a que des sorties digitales ( 0 ou 5V ), dont certaines peuvent être modulées en pwm. C'est quoi, un signal pwm ? lire ci-dessous./ https://www.electronique-mixte.fr/pwm/ La bonne nouvelle, c'est que convertir un signal "carré", dont la tension moyenne dépend du "duty cycle" ' % de temps pendant lequel le signal est à "1" ou 5V, et celui où il est à "0" soit 0 V, n'est pas compliqué : il suffit de le filtrer avec un filtre passe-bas ou deux, ou encore trois, pour obtenir un beau signal analogique continu à la bonne tension. En associant une résistance et un condensateur (capa), on crée facilement un filtre dit "d'ordre1". En en mettant deux en cascade, on lisse le résultat, et on obtient ce résultat avec un certain retard qui dépend du produit entre les valeurs R et C : RxC. le RC s'appelle aussi la constante de temps. Un tel filtre se charge ( effet du condensateur ) en à peu près 3 fois cette constante de temps. Voilà donc ce que j'ai utilisé : et ce que ça donne en simulation : On remarquera qu'un seul filtre (sortie bleue) est insuffisant (on s'en serait douté...), et qu'il faut en mettre un second pour obtenir un signal plus "lisse". Ce montage est aussi appelé "intégrateur", en ce sens que, pour une tension d'entrée qui passe de zéro Volts à une tension V, fixe, la tension de sortie monte petit à petit pour atteindre "V" au bout d'un temps égal à environ 3 à 4 fois RC. La constante de temps est choisie en fonction du "ripple' qu'on accepte ( variations résiduelles) et plus encore du traitement qu'on va effectuer par la suite sur le signal MAF. Sans encore dévoiler les aspects "logiciels", traiter/corriger le signal MAF plus de 12 fois par seconde (toutes les 80ms), est largement suffisant, et le retard de 80ms que cela va engendrer, imperceptible pour le conducteur. La constante de temps choisie pour notre filtre du 2e ordre ( deux filtres du premier ordre en cascade) est choisie compatible de ces 80ms.
-
si, récemment sur ses tests des boitiers "à Leds" - qui ne font rien. Il connait son sujet.
-
le gars est vraiment très clair dans ses analyses. J'aime.
-
si, si, tu peux @etr89. Il suffit de vouloir. Vouloir c'est pouvoir.
-
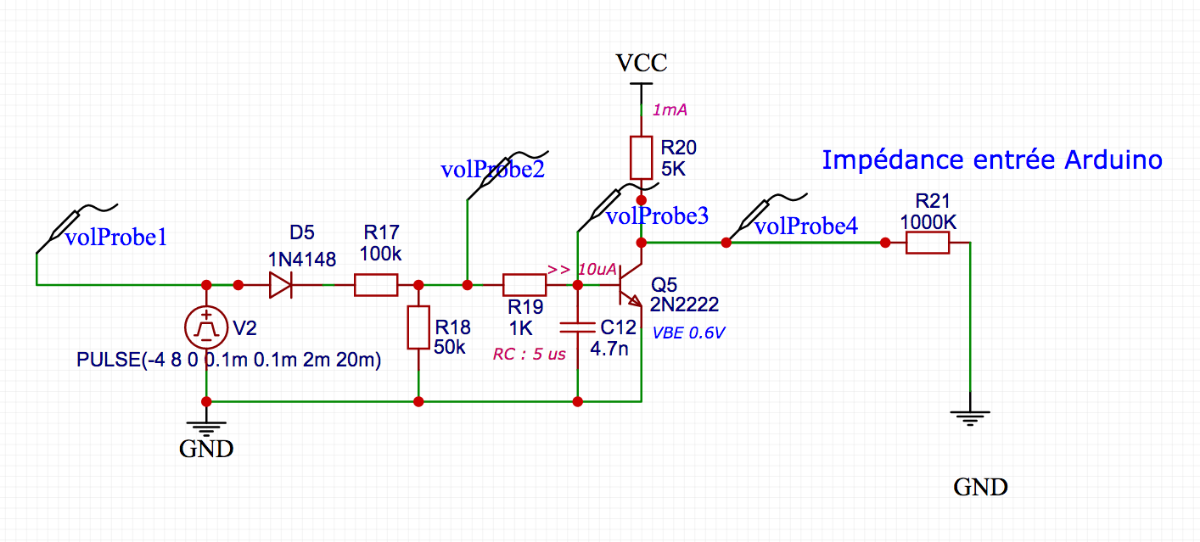
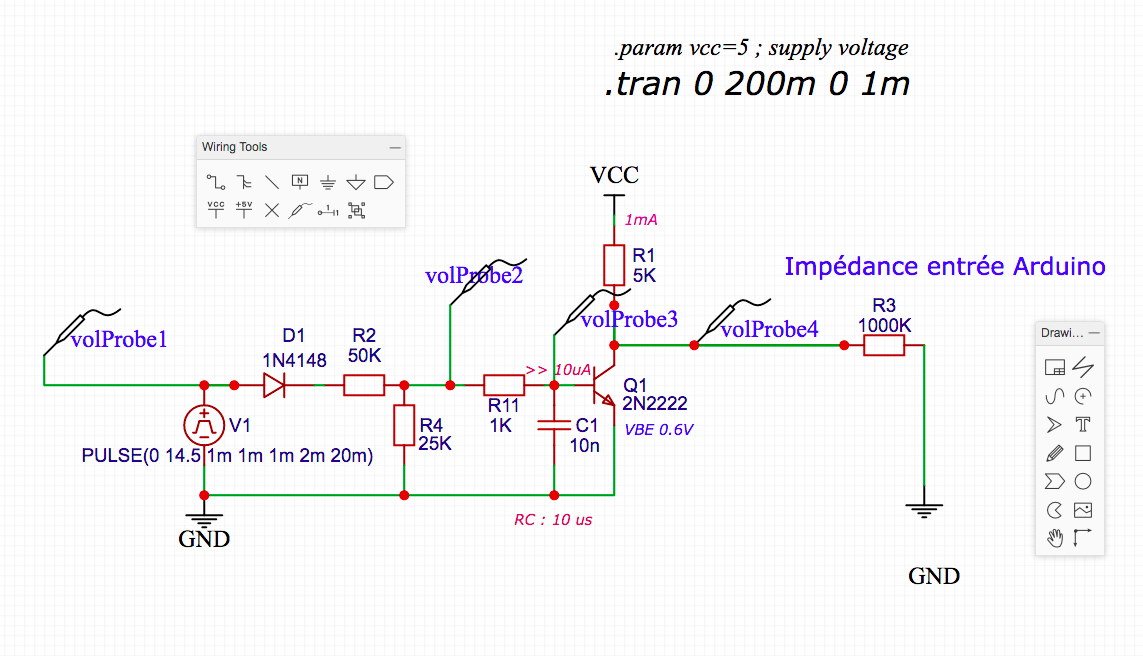
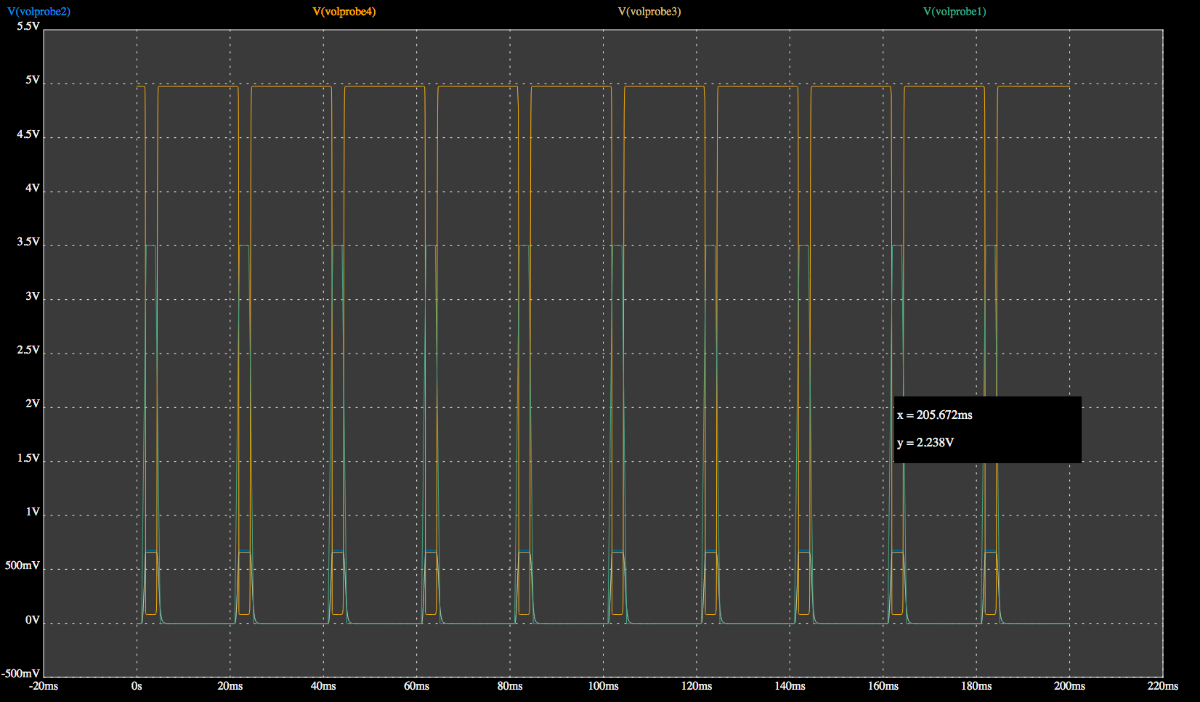
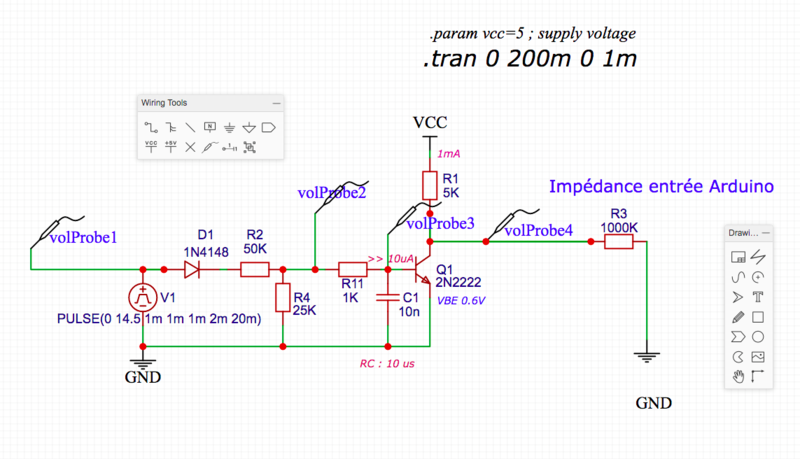
y'a pas de souci. Tu peux aussi te créer un compte sur le site chinois EASYEDA. Tous les composants classiques y sont répertoriés. Tu peux y faire des schémas une fois que tu as compris comment marche l'outil, et même faire des simulations et voir comment évoluent les signaux dans le temps. Ci-joint le fichier projet EasyEDA de l'acquisition RPM. En mode simulation, on peut faire varier les valeurs de résistance et de capa, ainsi que la tension du générateur uilisé pour cette simulation ( sachant que ce qui sort du capteur n'est pas un beau signal carré !). Une diode de redressement, pour supprimer l'alternance négative, un pont de résistance pour faire en sorte de diminuer la tension d'1/3, avec des valeurs de résistance assez élevée pour ne pas pertuber ni le capteur en tirant trop de courant, ni l'ECU. La tension sera ensuite toujours inférieure à 5V, et on l'utilise pour commander un transistor. J'en ai pris ici un très classique pour faire de la 'commutation' ou 'switching', en le faisant travailler en mode "saturé" ( interrupteur ). Pour ce faire il faut le "polariser", c'est à dire faire en sorte de respecter ses spécifications pour le mettre en condition de faire ce qu'on attend de lui. Pour qu'il soit en mode "saturation", il faut que le courant sur la base soit au moins de deux fois le courant sur le collecteur multiplié par le gain ( ici 65 min d'après la notiice technique disponible sur le net ). J'ai fixé Ic en mettant une résistance de 5K entre le collecteur et le +5V, donc le courant Ic est de 1mA ( pas besoin de plus ...). Du coup il faut au moins 30 micro-ampères sur la base. En mode "saturé" la tension VBE ( base émetteur) est pour ce transistor de 0.6V. La tension mini après la diode et le pont de résistance est de 4V ( sortie capteur ) - 0.5V diode donne 3.5V divisé par 3 (pont de résistances) soit environ 1,2V. et pour la faire chuter un peu encore j'ajoute une résistance de 1K (car il faut garder en mémoire que pour plus haut dans les tr/mn ,la tension montera à plus de 12V ). Du coup, la plage de fonctionnement de ce montage est d'environ 3.5V à au delà de 14,5V, en tirant le minimum de courant sur l'alim. Enfin, j'ai ajouté une petite capa pour filtrer le bruit. ( et dans mon cas, je suis également repassé par un ampli OP en mode suiveur pour présenter une impédance la plus faible possible à l'entrée Arduino, pas présenté ici ). Les puristes remarqueront que nous sommes passés en "logique inversée", mais comme ce ne sont que les fronts qui nous intéressent et vont nous permettre de compter et de mesurer le temps écoulé dans l'Arduino, on s'en moque. Et les capas et résistances coûtent quelques centimes, donc... Avec une entrée à 14,5V : et une entrée à 3.5V - limite basse. En dessous ça ne marchera pas - ( on s'attend à un minimum de 4V ) : La simulation marche, mon montage aussi, mais c'est peut-être un hasard... RPM simulation_2020-11-02_09-51-44.json


-
excellent !
-
et tu peux en fabriquer pour pas cher en mélangeant du pétrole lampant (kérosène) du white spirit, et du WD40.
-
tu verras, ce n'est pas si compliqué. Une résistance, ça résiste à l'avancement des électrons, et ça fait chuter la tension ( U = R x I ) Une capa (condensateur) se charge et se décharge. Associée à une résistance, elle permet de filtrer des fréquences indésirables Une diode, empêche le courant de passer dans un sens, et pas dans l'autre. et enfin le transistor s'utilisera ici comme un interrupteur ON/OFF, qu'on fera fonctionner en lui mettant, ou pas, une tension sur la base, qui laissera passer (ou pas) un courant depuis le collecteur jusqu'à l'émetteur. On pourra ainsi, avec un signal 5V ou 0V, faire passer, ou non, du 12V par exemple. On verra l'ampli op plus tard.... mais on l'utilisera en mode, "suiveur".
-
non, pas si loin si tu connectes le transistor différemment et que tu le polarises bien.